New Publication Highlights Advances in Object‑Based Visual Attention for Safer Street‑Crossing in VR

We are excited to share a newly published scientific article that contributes to advancing human–machine interaction and pedestrian safety—topics closely aligned with BERTHA’s mission.
This work was carried out by a research team involving scientists from the German Research Center for Artificial Intelligence (DFKI) – BERTHA’s consortium partner – together with a collaborator from the Max Planck Institute for Intelligent Systems and the Institute for Visualization and Interactive Systems (VIS) at the University of Stuttgart. Their joint publication, ObjectVisA‑120: Object‑based Visual Attention Prediction in Interactive Street‑Crossing Environments, introduces a breakthrough dataset and modelling approach for studying pedestrian attention in virtual‑reality street‑crossing scenarios.
An overview of the article
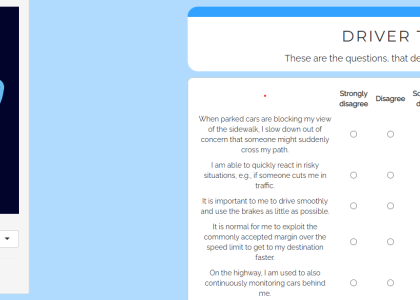
The ObjectVisA‑120 dataset captures VR street‑crossing behaviour from 120 participants, offering high‑quality gaze data and comprehensive object information in realistic traffic scenarios—data that is difficult to obtain safely in real environments. It includes detailed annotations such as segmentation, depth information, and vehicle keypoints, supporting more robust attention‑modelling research.
The authors also introduce oSIM, a new metric that evaluates visual‑attention models based on object‑level attention, reflecting how humans naturally focus on meaningful scene elements. Models optimized for object‑based attention show improved performance across evaluation measures.
Additionally, the study presents SUMGraph, an object‑centric model that encodes vehicles and other scene elements as graph structures. This model outperforms several state‑of‑the‑art predictors, demonstrating the benefit of explicitly representing objects in attention modelling.
Accepted for Publication at a Leading Symposium
The article has been accepted for publication at the IEEE Intelligent Vehicles Symposium (IV) 2026, a major international conference in the field of intelligent mobility and autonomous driving, that will take place in 22-25 June 2026, in Detroit, MI, United States.